MR099M Hợp tác cánh tay robot 6 trục có camera và tay cầm Thiết bị giáo dục Đào tạo nghề Cơ điện tử Huấn luyện viên
1. Tổng quan về sản phẩm
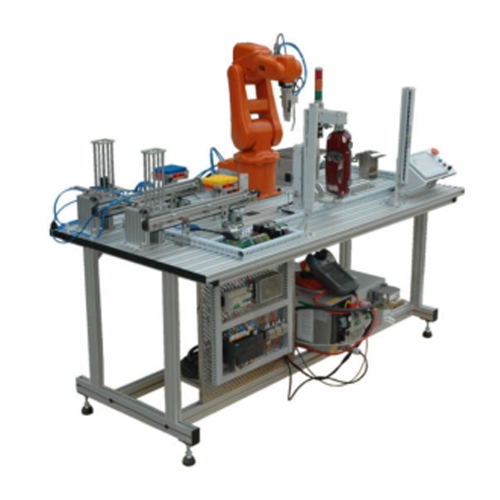
Thiết bị này lấy robot công nghiệp và tầm nhìn máy làm cốt lõi, tích hợp hữu cơ cơ khí, khí nén, điều khiển chuyển động, điều chỉnh tốc độ chuyển đổi tần số, công nghệ điều khiển PLC, cấu trúc mô-đun, dễ kết hợp, để đạt được khả năng phát hiện và lắp ráp nhanh chóng các vật liệu khác nhau. Để tạo điều kiện cho việc đào tạo và giảng dạy thực tế, hệ thống đã được thiết kế đặc biệt để hoàn thành các loại đào tạo cá nhân rô bốt khác nhau và đào tạo dự án toàn diện, đồng thời hoàn thành các loại đào tạo cá nhân rô bốt khác nhau và đào tạo dự án toàn diện. Có thể thực hiện giảng dạy robot sáu trục, định vị, cầm nắm, lắp ráp, cất giữ và các khóa đào tạo khác,
Nó bao gồm rô bốt công nghiệp sáu bậc tự do, hệ thống kiểm tra trực quan thông minh, hệ thống điều khiển PLC và một bộ cơ chế cấp liệu, vận chuyển, lắp ráp và lưu kho, có thể thực hiện các hoạt động như phân loại, kiểm tra, xử lý, lắp ráp và bảo quản phôi.
Các thành phần của nền tảng đều được cài đặt trên bảng hồ sơ. Cấu trúc cơ khí, mạch điều khiển điện và bộ truyền động tương đối độc lập và được thiết kế với các bộ phận tiêu chuẩn công nghiệp. Thông qua nền tảng này, nó có thể được đào tạo về các khía cạnh khác nhau như lắp ráp cơ khí, thiết kế mạch điện và đi dây, lập trình và gỡ lỗi PLC, chỉnh sửa quy trình trực quan thông minh, lập trình robot công nghiệp và ứng dụng gỡ lỗi, và phù hợp cho các trường cao đẳng nghề và trường kỹ thuật liên quan đến tự động hóa chuyên ngành. Việc đào tạo thực hành các khóa học như "Công nghệ điều khiển" và "Công nghệ tự động hóa" phù hợp cho các kỹ thuật viên tự động hóa thực hiện đào tạo kỹ sư và thi tay nghề.

2. Hiệu suất kỹ thuật
1. Nguồn điện đầu vào: một pha ~ 220V ± 10% 50Hz
2. Môi trường làm việc: nhiệt độ -10 ℃ ~ + 40 ℃, độ ẩm tương đối ≤85% (25 ℃), độ cao <4000m
3. Công suất thiết bị: <1.5kVA
4. Kích thước của nền tảng đào tạo: 1500mm × 880mm × 1400mm
5. Bảo vệ an toàn: với bảo vệ rò rỉ, an toàn đáp ứng các tiêu chuẩn quốc gia

3. Cấu trúc và thành phần thiết bị
Nền tảng đào tạo bao gồm hệ thống rô bốt công nghiệp sáu bậc tự do, hệ thống kiểm tra trực quan thông minh, hệ thống điều khiển lập trình (PLC), bộ cấp liệu, bộ phận băng tải, bộ phận lưu trữ tạm thời chất thải thức ăn chăn nuôi, bộ phận xử lý tạm thời bộ phận lưu trữ, bộ phận lắp ráp phôi, Nó bao gồm bộ phận kho, các phôi khác nhau, bàn đào tạo hồ sơ, bàn máy tính hồ sơ, v.v.
1. Hệ thống robot công nghiệp sáu bậc tự do
Nó bao gồm cơ thể rô bốt, bộ điều khiển rô bốt, bộ phận dạy học, bộ chuyển đổi tín hiệu đầu vào-đầu ra và cơ cấu cầm nắm. Nó được trang bị bộ kẹp khí nén và có thể thực hiện các hoạt động như xử lý, lắp ráp và tháo rời phôi.
1) Cơ thể rô bốt được cấu tạo bởi các khớp sáu bậc tự do và được cố định trên bàn huấn luyện biên dạng. Nó có 6 bậc tự do. Các phương pháp lắp đặt của rô bốt công nghiệp kiểu khớp nối tiếp bao gồm lắp đặt trên mặt đất, lắp đặt treo và lắp đặt ngược.
2) Phạm vi làm việc của trục đầu tiên là + 170 ° / -170 °, tốc độ quay tối đa là 370 ° / s
3) Phạm vi làm việc của trục thứ hai là + 110 ° / -110 °, tốc độ quay tối đa là 370 ° / s
4) Phạm vi làm việc của trục thứ ba là + 40 ° / -220 °, tốc độ quay tối đa là 430 ° / s
5) Phạm vi làm việc của trục thứ 4 là + 185 ° / -185 °, tốc độ quay tối đa là 300 ° / s
6) Phạm vi làm việc của trục thứ 5 là + 125 ° / -125 °, tốc độ quay tối đa là 460 ° / s
7) Phạm vi làm việc của trục thứ 6 là + 360 ° / -360 °, tốc độ quay tối đa là 600
8) Bán kính làm việc tối đa là 500mm
9) Tải trọng 5kg
10) Thiết bị giảng dạy rô bốt có màn hình LCD, nút bật, nút dừng khẩn cấp và bàn phím vận hành, được sử dụng để cài đặt tham số, giảng dạy thủ công, chỉnh sửa vị trí, chỉnh sửa chương trình và các hoạt động khác.
2. Hệ thống kiểm tra trực quan thông minh
Được trang bị một bộ hệ thống thị giác thông minh, bao gồm bộ điều khiển tầm nhìn, nguồn ánh sáng trắng, camera quan sát và màn hình giám sát. Nó được sử dụng để phát hiện các đặc điểm của phôi, chẳng hạn như số, màu sắc, hình dạng, v.v. và cũng có thể thực hiện các hoạt động phát hiện thời gian thực trên hiệu ứng lắp ráp. Nó được kết nối với PLC hoặc bộ điều khiển robot thông qua cáp I / O, đồng thời hỗ trợ bus nối tiếp và bus Ethernet để kết nối với PLC hoặc bộ điều khiển robot để truyền kết quả thử nghiệm và dữ liệu thử nghiệm.
3. Bộ điều khiển lập trình Siemens
Được trang bị bộ điều khiển lập trình Siemens S7-1200, nó đi kèm với mô-đun giao tiếp Ethernet, mô-đun mở rộng kỹ thuật số để điều khiển hoạt động của rô bốt, động cơ, xi lanh và các thiết bị truyền động khác, xử lý tín hiệu phát hiện của từng đơn vị, quản lý quy trình làm việc, truyền dữ liệu và các thiết bị khác các nhiệm vụ.
4. Bộ phận cho ăn
Nó bao gồm phễu, bàn quay, cơ cấu dẫn vật liệu, trượt phôi, nguồn điện chuyển mạch, bộ điều khiển lập trình, nút, bảng giao diện I / O, bảng giao diện truyền thông, tấm lưới điện và động cơ bánh răng DC. Quay trở lại bàn cho ăn và lần lượt gửi đến trạm kiểm tra.
5. Đơn vị vận chuyển
Chứa một bộ hệ thống điều khiển tốc độ xoay chiều, bao gồm bộ biến tần, động cơ xoay chiều ba pha, băng tải, cảm biến sợi quang, v.v., được lắp đặt trên bàn luyện biên dạng, dùng để chuyển phôi.
6. Bộ phận lắp ráp phôi
Nó bao gồm cảm biến sợi quang phôi, bàn xử lý, xi lanh, vật liệu nhỏ, vv Nó được lắp đặt trên băng chuyền và được sử dụng để lắp ráp phôi.
7. Đơn vị kho
Bao gồm nhôm định hình và kính máy
8. Lưu giữ tạm thời phế phẩm
Nó được cài đặt trên bảng đào tạo hồ sơ, và tạm thời lưu trữ các nguyên liệu bất thường để cho ăn và nguyên liệu bất thường để chế biến.
4. Dự án đào tạo thực tế
1. Nguyên lý, sử dụng và gỡ lỗi của hệ thống thị giác máy
2. Nguyên lý, sử dụng và gỡ lỗi của hệ thống rô bốt công nghiệp sáu trục
3. Hiệu chỉnh và chuyển đổi lẫn nhau giữa hệ tọa độ rô bốt công nghiệp sáu trục và hệ tọa độ thị giác máy
4. Lắp đặt và vận hành các ứng dụng tích hợp của rô bốt công nghiệp và hệ thống thị giác máy
5. Thiết lập mẫu hệ thống thị giác máy, lập trình và gỡ lỗi
6. Gỡ lỗi thủ công của rô bốt công nghiệp thông qua thiết bị giảng dạy
7. Đặt và sửa đổi tọa độ của từng điểm kiểm soát thông qua đơn vị giảng dạy
8. Viết và sửa đổi các chương trình rô bốt công nghiệp thông qua đơn vị giảng dạy
9. Cài đặt tọa độ theo dõi robot
10. Phát triển phần mềm và lập trình hệ thống robot công nghiệp
11. Chỉnh sửa và gỡ lỗi đầu vào hình ảnh trực quan thông minh
12. Kết quả trực quan thông minh để chỉnh sửa và gỡ lỗi
13. Phép đo so sánh màu trực quan thông minh
14. Đo lường so sánh số trực quan thông minh
15. Đo lường so sánh kích thước trực quan thông minh
16. Đo góc trực quan thông minh
17. Ứng dụng tích hợp hệ thống thị giác thông minh và robot công nghiệp
18. Lập trình và gỡ lỗi chương trình PLC
19. Ứng dụng tích hợp hệ thống thị giác thông minh và robot công nghiệp
20. Kết nối biến tần và mạch chính của động cơ AC
21. Cài đặt thông số và hoạt động của bảng biến tần
22. Bảng điều khiển bộ biến tần điều khiển Điều chỉnh tốc độ động cơ AC
23. Điều khiển động cơ khởi động và dừng thông qua đầu nối bên ngoài của biến tần
24. Lắp đặt vòng điều khiển hướng khí nén
25. Lắp đặt vòng điều khiển tốc độ khí nén
26. Lắp đặt vòng điều khiển trình tự khí nén
27. Hệ thống khí nén kết nối mạch khí
28. Điều chỉnh vị trí của công tắc tự động
39. Gỡ lỗi hệ thống khí nén










